Coordinate Systems
Data points are reported in one of two coordinate systems, which depends on the alignment state of the sensor.
- Unaligned (sensor) coordinates: Used on unaligned sensors.
- Aligned (system) coordinates: Used on aligned sensors.
Understanding coordinate systems is an important part of understanding measurement results.
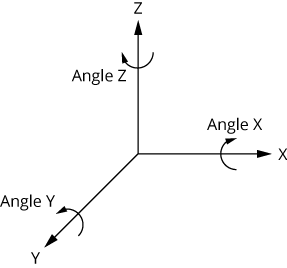
The Z axis represents the sensor's measurement range (MR), where the values increase toward the sensor. The X axis and Y axis represent the sensor's field of view (FOV).
X offset, Y offset, and Z offset define the translations from the origin.
Rotations are specified based on rotating the target around the X axis (Angle X), followed by rotating around the Y axis (Angle Y), followed by rotating around the Z axis.
Unaligned Coordinates
Unaligned sensors use sensor coordinates, that is, the coordinate system is relative to the sensor itself. The measurement range (MR) is along the Z axis.
Before alignment, the origin of the sensor is at the center of the sensor's measurement range (MR) and field of view (FOV).

Aligned Coordinates
Understanding aligned coordinates is important for two reasons. First, they are the direct result of performing the built-in alignment procedure. Second, they change how scan data is represented and how measurement results should be interpreted. For more information on aligning sensors, see Aligning Sensors.
The adjustments resulting from alignment are called transformations (offsets along the axes and rotations around the axes). Transformations are displayed in the System > Alignment page. Note that currently, you can ignore Sensor Group Transforms, which represent the transformations between groups of sensors; support for this will be available in future versions of the sensor software.
X angle is positive when rotating from positive Y to positive Z. Z angle is positive when rotating from positive X to positive Y.
Alignment can be used to establish a transformed coordinate system according to the user's needs. Alignment determines the adjustments to X, Y, and Z, as well as rotation angle around each axis. Transformed coordinate systems can be associated with specific sensor jobs. For details, see Aligning Sensors.
When applying the transformations, the data is first rotated around X (clockwise, with the X axis toward the viewer), then Y (counterclockwise), and then Z (clockwise), and then the offsets are applied.